Mr. Red Adair benannt nach dem wohl berühmtesten Feuerwehrmann der Welt, Paul „Red“ Adair ist ein Feuerwehr Roboter. Natürlich nicht für echte Feuer sondern nur für kleinere Brände wie z.B. Kerzen oder Teelichter. Der Roboter nahm erfolgreich an einem Roboter Wettbewerb teil, allerdings keinem speziellen Feuerwehr Roboter Wettbewerb sondern am LMR DAGU Mr. Basic Wettbewerb von letsmakerobots.com.

LMR DAGU Mr. Basic Wettbewerb:
Das Chassis von Mr. Red Adair ist das Mr. Basic Chassis der chinesischen Firma DAGU / AREXX. DAGU / AREXX ist auch Hersteller der Asuro Bausätze und hat für letsmakerobots (LMR) eine Sonder Edition von 50 Mr. Basic Chassis für den Wettbewerb zur Verfügung gestellt. Für einen Unkostenbeitrag von 22US$ konnte jedes LMR Mitglied einen der Bausätze erwerben und am Wettbewerb teilnehmen. Regeln gab es keine besonderen. Man musste lediglich den kompletten Bausatz (mit Ausnahme der Aufbauten wie z.B. der Leerplatine und dem Batteriefach) verwenden. Prämiert wurden die ersten 3 Roboter Modelle mit den meisten User Stimmen. Der Wettbewerb endete am 5. Juli 2009. Mit etwas Glück landete Mr. Red Adair unter den ersten Drei und erhielt ein Preisgeld von 100US$.
Aufbau
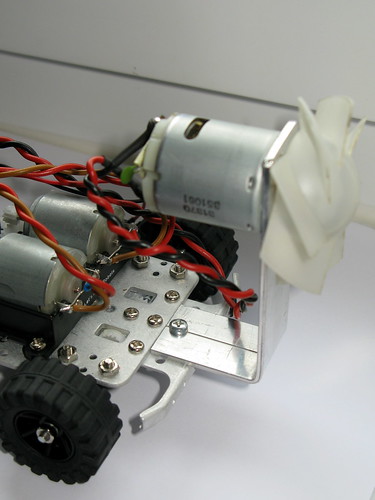
Mr. Red Adair besteht aus dem Mr. Basic Chassis mit seinem 4-Rad Antrieb. 2 DC Motoren mit angeschlossenem Getriebe und den Antriebsachsen bilden einem gewöhnlichen differentiellem Roboter Antrieb. Nach anfänglichen Schwierigkeiten mit falsch gelieferten Achsen läuft das ganze nun doch noch rund. Die Schrauben müssen allerdings regelmäßig nachgezogen werden oder besser gleich mit Sekundenkleber fixiert werden.

Steuerung
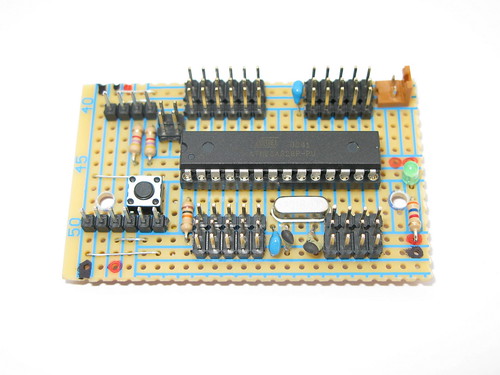
Als Gehirn kommt ein Atmel ATmega328 mit Arduino Bootloader zum Einsatz. Der Controller wurde einfach auf Lochraster aufgebaut, mit den üblichen Steckverbindern für Sensoren/Aktoren (3polig, Signal, VCC, GND) für alle IOs, FTDI USB-UART Kabel (6polig), Reset Taster und einem 16MHz Quartz bestückt. Damit ist er unter der Arduino Oberfläche als normales Arduino Duemilanove Board ohne Änderungen ansprechbar. Aufgrund des USB-UART Anschlusses und dem bereits eingebrannten Bootloader kann der obligatorische ISP Steckverbinder entfallen.
Sensoren
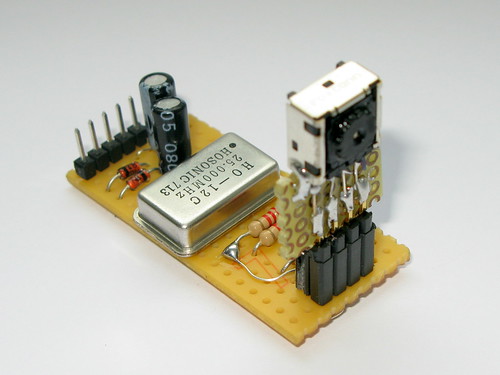
Als Sensoren kommt zum neben einem Maxbotix EZ1 Ultraschall Entfernungsmesser nur noch eine Wii IR Camera als Flammendetektor zum Einsatz. Die Wii IR Camera wurde aus einer Original Wii Remote ausgelötet und zusammen mit einigen anderen Bauteilen auf Lochraster aufgebaut. Dank an U. Jürss vom CC2 für die Schaltung. Die Wii IR Camera verfügt über ein I2C Interface und kann so recht einfach vom Arduino Controller ausgelesen werden. Nach Senden der Initialisierungs Sequenz kann man die Koordinaten (X, Y) und die Intensität von bis zu 4 Infrarot Quellen auslesen. Die Koordinaten umfassen 1024×1024 Punkte, der Erfassungsbereich beträgt etwa 1-2m für eine Kerze in einem horizontalen Winkel von ca 40°. Die Intensität der IR Quelle kann in 15 Stufen erfasst werden, daraus lässt sich in Grenzen auf die Entfernung zum Objekt schließen. Ansonsten dient der EZ1 zum Erkennen der Entfernung zum Objekt.
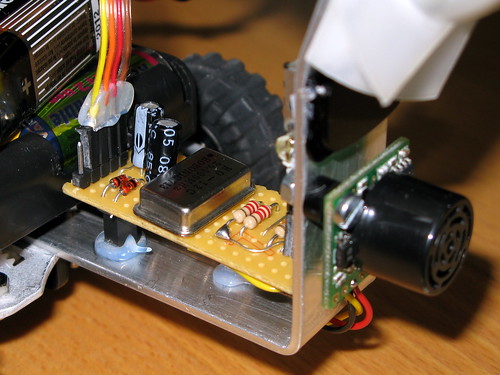
Der Wii IR Sensor mit externer Beschaltung auf Lochraster. Wichtig ist, den Sensor mit dem IR Filter zu betreiben, jene schwarze Kunststoffsscheibe, die sich vor dem Sensor im Wii Remote Gehäuse befindet.
Aktoren
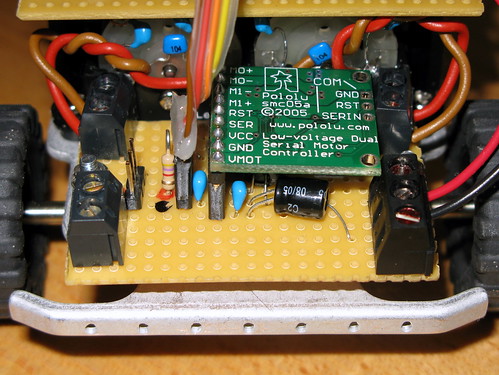
Da die Mabuchi RE-260 Motoren nur mit max. 4.5 V betrieben werden, aber gerne bis zu 2A ziehen, sind Motor Treiber mit besonderen Anforderungen gefragt. Zwar wäre es nach Reglement möglich mehr Batterien (z.B. 6xAA) zu verwenden und die Motoren über PWM zu regeln (ohne 100% Ansteuerung). Ich entschied mich für den Pololu LVDSMC Low Voltage Serial Dual Motor Controller (LVSDMC) und komme dafür mit dem Original 3xAA Batteriepack aus. Allerdings war noch eine 9V Block Batterie für die Elektronik (5V geregelt) und den Blower Motor (9V ungeregelt) notwendig. Der Blower Motor ist vorne am Chassis mit einem Alu Winkel befestigt und wird einfach über einen N-FET ein- und ausgeschaltet. Eine Motorbrücke ist hier nicht notwendig, da er immer nur in dieselbe Richtung läuft. Zum Einsatz kommt hier ein Motor, den ich aus einem defekten Haar Trockner ausgebaut hatte. Ohne zu wissen, das dieser Motor auch mit Gleichstrom läuft hatte ich ihn mal testweise an eine Batterie geklemmt und er lief. So konnte dann auch gleich der Propeller ohne Änderung mit übernommen werden. Mit t 9V lief der Motor flott genug um eine Kerze oder ein Teelicht auszublasen. Dabei zieht er zwar ca. 500mA, aber er läuft ja nur kurze Zeit.
Der Pololu Low Voltage Dual Serial Motor Controller (LVDSMC) benötigt nur zwei Prozessor Pin und einige wenige externe Bauteile. Ein paar Abblock Kondensatoren (100µF und 100nF) und ganz wichtig ein Pullup Widerstand von 1..1.5kOhm an der Reset Leitung. Über den Reset Pin kann der Motor Controller zurückgesetzt werden, der andere Pin ist für die Kommunikation zuständig. Ein simples serielles Protokoll, mit einer Soft-UART auf dem Arduino Prozessor simuliert, reicht aus. So bleibt die normale UART für Debug Ausgaben frei.
Videos
Das erste Video zeigt den Test der Einzelkomponenten.
Das zweite Video zeigt den finalen Test.
Find ich super!