Bei der Entwicklung von MASHR gefiel mir die Idee, den Roboter über das Android Handy fernsteuern zu können. Die Cellbots Applikation ist echt genial. Leider ist es mit meinen Java Programmier Künsten nicht weit her um so ein Programm selbst zu schreiben. Allerdings geht es auch ohne Java und großen Programmierkentnissen, dank Googles App Inventor.

„Android App Inventor“ weiterlesen
Robot Fun
Ein bisschen Spaß muss sein. Dies ist eine Sammlung von lustigen Videos über Roboter. Viel Spaß beim Anschauen 😉
Spaß mit einem 6 Achsen Roboter.
httpv://www.youtube.com/watch?v=9PMCiMij0kQ
„Robot Fun“ weiterlesen
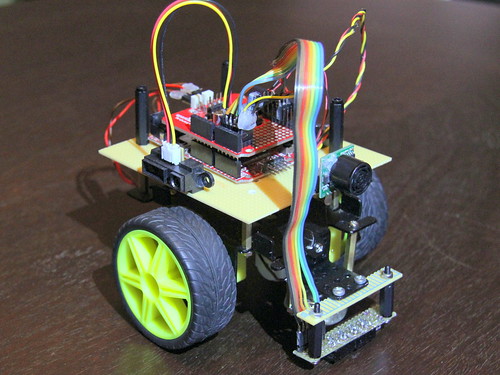
MASHR – Mein Arduino Start Here Robot
MASHR ist mein Versuch, einen Roboter für Anfänger zu bauen. Es basiert auf Arduino, läuft aber nicht mit einem Standard-Arduino booard. Stattdessen wurde ein Romeo all-in-One-Roboter Controller (Arduino mit Motorantrieb) von DFrobot verwendet. Das Chassis besteht aus einer Polystyrol (PS) Platte. Die Pololu Räder und Motoren geben eine gute Traktion und die Möglichkeit später Rad-Encoder hinzufügen.

Sharp IR Sensor Ausgabe verbessern
Die Sensoren der Sharp GP2Dxxx IR Familie werden sehr oft als Distanz Sensoren in der Robotik eingesetzt. sie sind preiswert und weltweit verfügbar. Normalerweise werden diese Sensoren für automatische Wasserhähne, Händetrockner und Urinale eingesetzt, weniger für Robotik.

Es gibt folgende Sensoren mit analogem Ausgang:
- Der Sharp GP2Y0A02YK hat einen Bereich von 20..150cm
- Der Sharp GP2D12 (ersetzt durch GP2YA21YK) hat einen Bereich von 10..80cm
- Der Sharp GP2D120 hat einen Bereich von 4..30cm
Wenn man diese Sensoren, bzw. Sensoren mit analogem Ausgang allgemein, in einer Umgebung wie der Robotik einsetzt, muß man mit gestörten Ausgangs Signalen rechnen. Bei den Sharp Sensoren ist es sogar so, das selbst unter optimalen Labor Bedingungen das Asugangssignal gestört ist. Betrachtet man sich da Signal mit einem Ozillokop, sieht man ein verrauschtes Signal mit einer Menge an üblen Spikes.
„Sharp IR Sensor Ausgabe verbessern“ weiterlesen
Pacman Roboter
Pacman ist ein kleiner autonomer Roboter. Er wird gesteuert von einem FEZ Domino Board auf dem das .NET micro framework läuft. Programmiert wird er in C# mit Visual Studio (Express oder Standard). Sein Anwendungsbereich umfasst derzeit:
- Hindernissen erkennen und ausweichen,
- einer Wand folgen,
- einer Linie folgen.