
Der HD-Bot ist ein kleiner modular aufgebauter Roboter. In der derzeitigen Planung verfügt der HD-Bot über keinen Prozessor. Die Ansteuerung der Motoren erfolgt direkt über die Sensoren. Der Name HD-Bot kommt vom verwendeten Chassis, das aus einer ausgeschlachteten Festplatte besteht. An Sensoren soll er in der höchsten Ausbaustufe über einen Lichtfolger, Linienfolger und einem Kollisionsdetektor verfügen.
Konzept
Der HD-Bot ist durch seine modulare Bauform zur Prototypen Entwicklung von Sensor Modulen gedacht. Die eingesetzten Module lassen sich leicht gegen andere austauschen, da alle Module die gleiche Platinengröße haben und die gleichen Steckverbinder verwenden.
Blockschaltbild
Antrieb:
Der Antrieb besteht aus 2 gehackten Servos. Die komplette Servo Elektronik ist dabei außer Betrieb genommen. der Servo Motor wird direkt über eine Gleichspannung angetrieben. Auf eine Motorbrücke werde ich zunächst verzichten, ein einfacher Leistungstransistor oder eine Relais sollte genügen. Damit besitzt der HD-Bot auch keinen Rückwärtsgang, er kennt nur vorwärts und Stop. Rechts und links drehen erfolgt durch abschalten eines Motors.
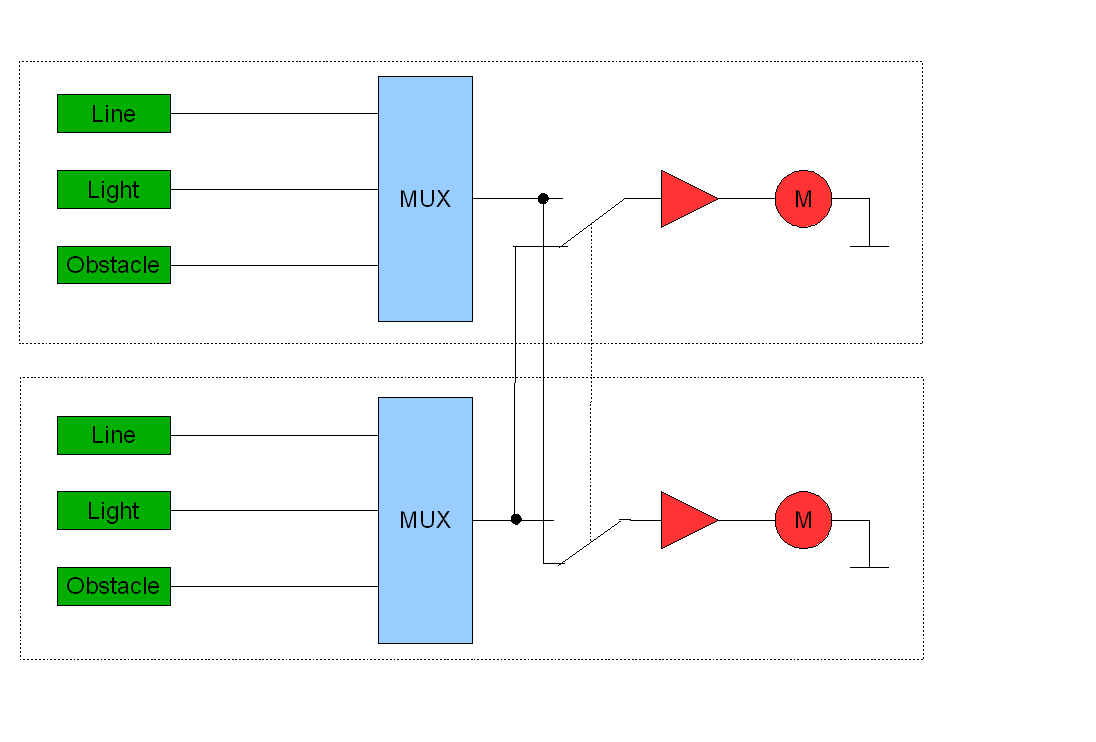
Sensoren:
An Sensoren soll der HD-Bot einmal im Endausbau über ein Paar Liniensensoren, Lichtsensoren, und Kollisionsdetektoren verfügen. Da immer nur ein Sensorpaar die Motoren steuern kann, erfolgt die Anwahl der Sensoren über DIP Schalter
und einen Analog Multiplexer. Über einen weiteren Wechselschalter können die Sensoren die Motoren über Kreuz (linker Sensor steuert rechten Motor, rechter Sensor steuert linken Motor) oder direkt ansteuern. Somit können verschieden Verhalten (z.B. Motte = Lichtfolger, oder Kakerlake = Lichtflüchter) realisiert werden