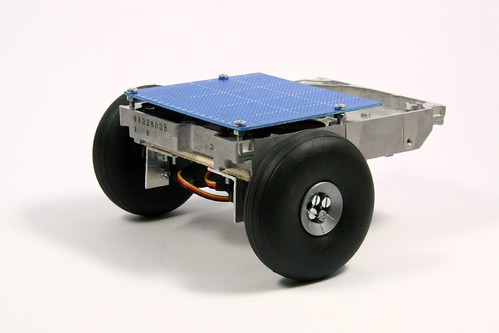
Die ersten Eletronik Boards für den HD-Bot sind fertig. Neben dem Motor Treiber gibt es den Liniensensor und ein Logik Board. Damit lassen sich schon die ersten Experimente anstellen.
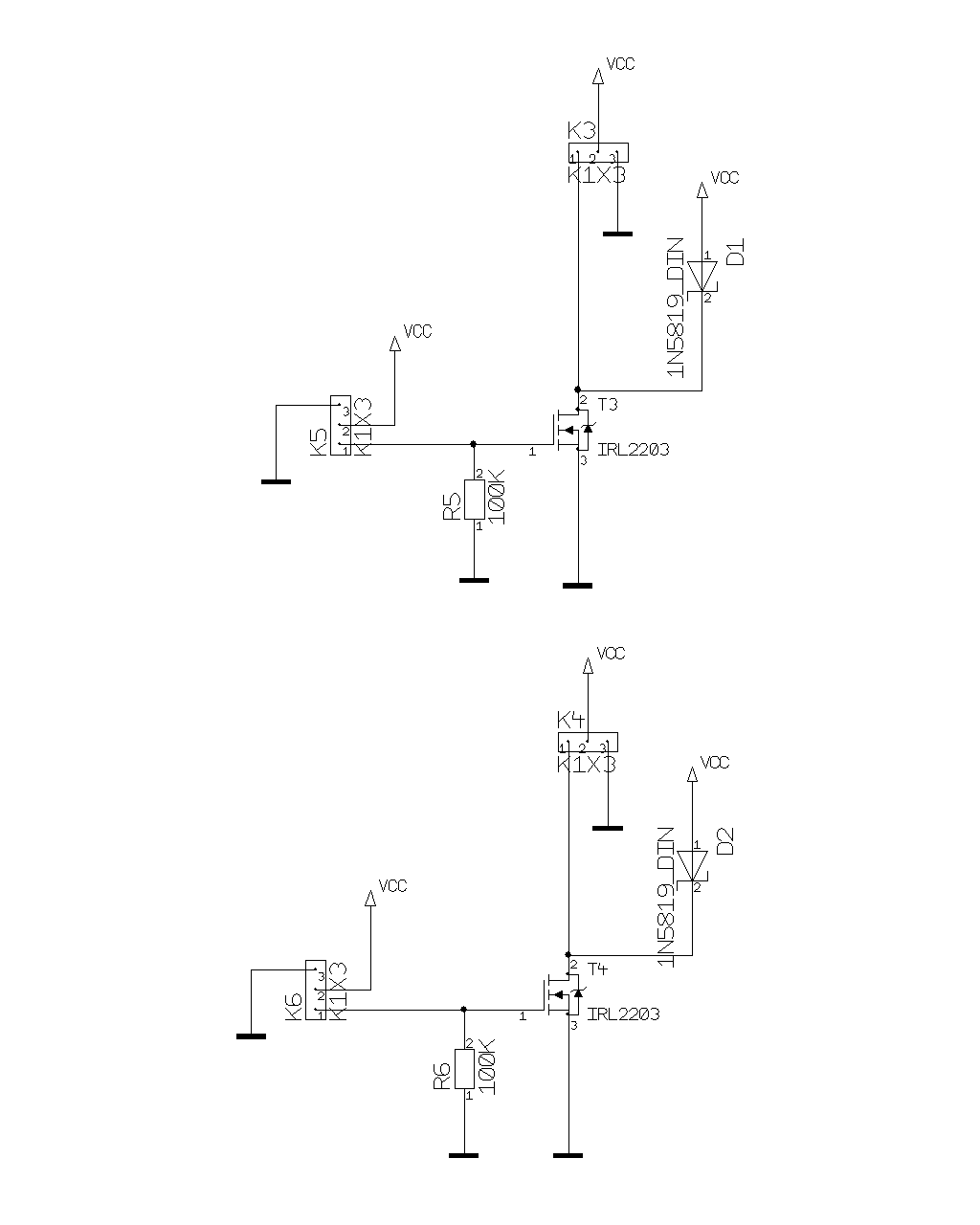
Motor Treiber

Der Motor Treiber besteht aus zwei Treibern für die beiden Motoren. Jeder Treiber besteht aus einem Logik Level FET (IRL2203), einer Freilaufdiode und dem Gate Widerstand. Es gibt wie gesagt keinen Rückwärtsgang und keine Geschwindigkeitsregelung.
Liniensensor

Der Liniensensor ist ebenfalls recht einfach aufgebaut. 2 Opto Reflex Koppler (CNY70) mit je einem Vorwiderstand für die IR LED und einem Pullup Widerstand für den Fototransistor.

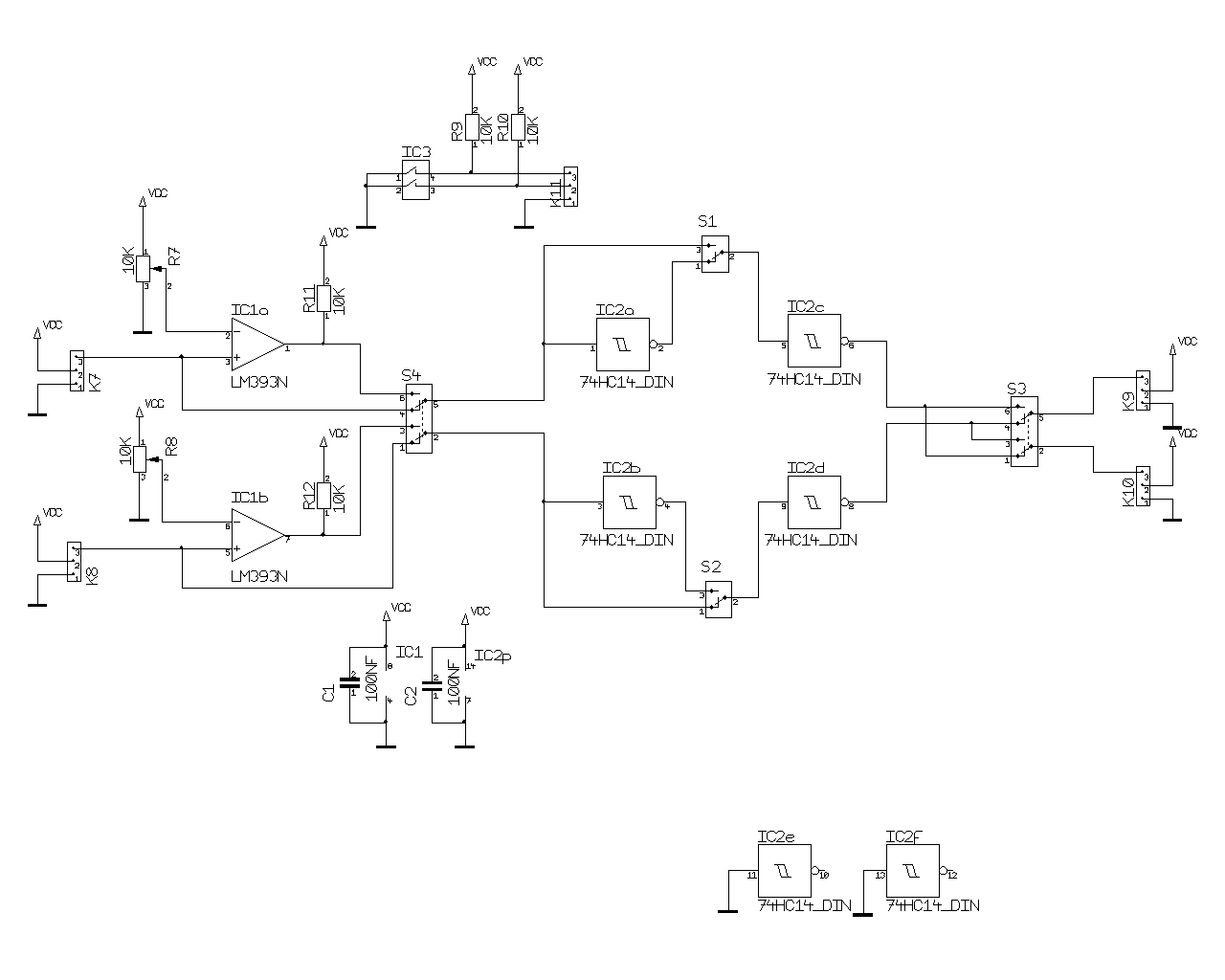
Logik Board

Wenn man es so nennen will, das Gehirn des HD-Bots. Das Logik Board besteht aus einem Doppel Komparator (LM393N), einem 6fach invertierendem Schmitt Trigger (74HC14), sowie einer Reihe von Miniatur Schaltern zum „Programmieren“. So kann man über einen Wechselschalter die beiden Eingangssignale der Sensoren entweder über die Komparatoren schleifen oder über die Schmitt Trigger Gatter.
Über zwei einzelne Umschalter kann das Signal nochmals über Schmitt-Trigger Gatter ein weiteres mal invertiert werden. Zu guter letzt können dann noch die beiden Ausgangssignale gekreuzt oder direkt ausgegeben werden.