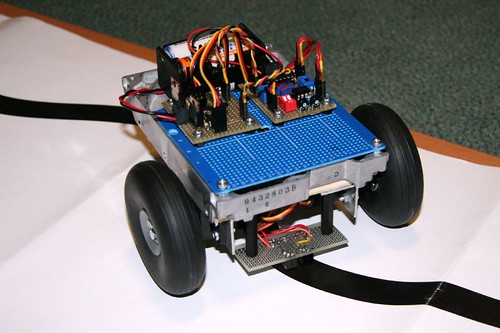
Der HD-Bot mit seinen bis jetzt verfügbaren Baugruppen wurde zusammengebaut und in Betrieb genommen. Die ersten Versuche mit dem Liniensensor verliefen auch soweit erfolgreich. Wenn man die Referenzspannung der beiden Komparatoren mit Hilfe der beiden Potentiometer abgeglichen hat, wird eine schwarze Linie auch problemlos erkannt.
Zum Abgleich positioniert man den Roboter auf einer weißen Fläche und dreht solange am Poti bis die zugehörige LED ausgeht. Dann kontrolliert man, ob die LED auf der schwarzen Fläche angeht. Dasselbe macht man mit dem anderen Sensor.
Durch das Logik Board lassen sich 2 verschiedene Arten von Linienfolgern realisieren.
Der Standard Linienfolger. Dazu muß der Ausgangs Umschalter auf gekreuzt stehen. Hier müssen sich beide Sensoren auf der Linie befinden , damit der Roboter gerade aus fährt. Liegt der rechte Sensor daneben, wird der linke Motor gestoppt und umgekehrt. Liegen beide Sensoren daneben, werden beide Motoren gestoppt.
Der Kantenfolger. Dazu wird einer der beiden Umschalter auf invertiernd gesetzt, der andere auf nicht invertierend. Der Ausgangsschalter steht auf nicht gekreuzt. Hier muß ein Sensor immer auf der Linie sein und der andere daneben, damit der Roboter geradeaus fährt. Sind beide Sensoren auf der Linie oder beide Sensoren neben der Linie wird eine Kurve gefahren. Der Roboter bleibt stehen, wenn sich der Sensor, der auf der Linie sein soll, daneben liegt, und der andere Sensor, der sich neben der Linie befinden soll, auf der Linie befindet. Youtube-Video des Kantenfolgers
Probleme
Leider versagt die Steuerung schon bei den ersten engeren Kurven. Das Problem, die Antriebsräder und der Liniensensor liegen zu dicht beisammen. Der Roboter schafft keine engen Kurven. Verliert er die Linie, bleibt er einfach stehen. Der Kantenfolger erwies sich als die bessere Methode, weil er hier auch mal die Linie verlieren kann und sie auch wiederfindet.
Folgende Änderungen könnten hier Besserung verschaffen:
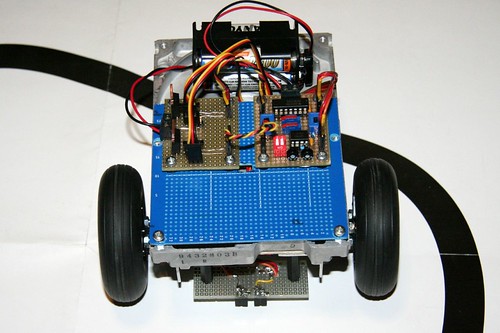
den Roboter umbauen, sodaß der Liniensensor am anderen Ende, vor dem Stützrad angebracht wird. Beim Roboter werden also vorne und hinten vertauscht.
Zwei zusätzliche Liniensensoren anbringen. Damit der Roboter nicht so leicht die Linie verliert. Genug Platz wäre auf der Platine noch vorhanden. Allerdings müßte man dann jeweils 2 Sensoren zusammenschalten (verodern?).
Das zweite Problem: Die Schaltung reagiert noch sehr stark auf Änderungen der Beleuchtung. Im Prinzip muß man immer vor jedem Start die Liniensensoren neu abgleichen. Dann dürfen sich aber die Belichtungsverhältnisse nicht mehr groß ändern. Auch hier könnte einige Änderungen Verbesserungen bringen:
Die Linienensoren gegen Fremdlicht abschirmen.
Statt jeden Komparator einzeln abzugleichen, die Eingangssignale auf beide Komparatoren legen (am einem Komparator Signal links auf dem positiven Eingang und Signal rechts auf den negativen Eingang und umgekehrt beim anderen Komparato)r. Diese Lösung könnte Probleme bereiten, weil dann bereits geringen Differenzen zwischen den beiden Liniensensoren den Komparator schalten lassen. Eine Hysterese wäre notwendig. Die läßt sich aber nicht ohne weiteres einstellen