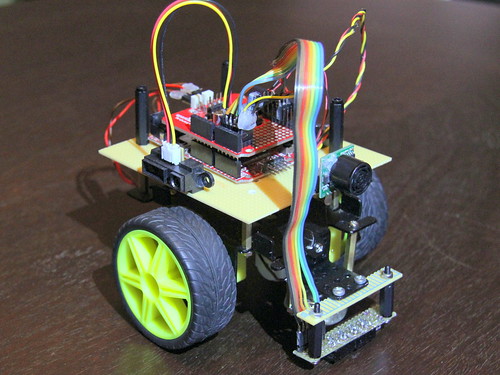
Pacman ist ein kleiner autonomer Roboter. Er wird gesteuert von einem FEZ Domino Board auf dem das .NET micro framework läuft. Programmiert wird er in C# mit Visual Studio (Express oder Standard). Sein Anwendungsbereich umfasst derzeit:
- Hindernissen erkennen und ausweichen,
- einer Wand folgen,
- einer Linie folgen.
Pacman war Teilnehmer am Dagu Robots beginner chassis Wettbewerb von letsmakerobots und belegte den 2. Platz (von 2 Teilnehmern)
Hardware
- FEZ Domino Board
- ArduMoto Board von Sparkfun
- DIY Linien Sensor mit 4 x CNY70 IR Opto Reflex Sensoren
- Sharp GP2D120 IR Sensor für Wand folgen
- Maxbotix EZ1 US Sensor für Hindernis Erkennung
- DAGU 2WD Beginners Robot chassis
- 2 x DAGU motors (Solarbotics GM8 clone)
- Piezo Lautsprecher für Sound Effekte



Schematics
Fez Domino Board Verdrahtung

Liniensensor

Software
Die Software findet man bei Google code.
Videos
Das folgende Video zeigt Pacman als Linienfolger.
Das nächste Video zeigt Pacman als Linienfolger und beim Hinderniss ausweichen.
Das letzte VIdeo zeigt eine verbesserte Version für den Dagu beginners robot Wettbewerb
Links
Wow, sehr beeindruckend. Tolles Blog.